« Back to Projects list

A Dog Tail for Robots
In this project, we designed a robotic dog tail prototype to leverage people's general understanding of dogs and their tails (e.g., tail wagging means happy) for investigating how different tail behaviours can be used to convey abstract affective states of a robot. Further, we aim at developing a set of tested design guidelines which can be leveraged by Human-Robot Interaction designers to convey affective states of their robots in an easy to understand way, to help people decide when and how to interact with a robot.
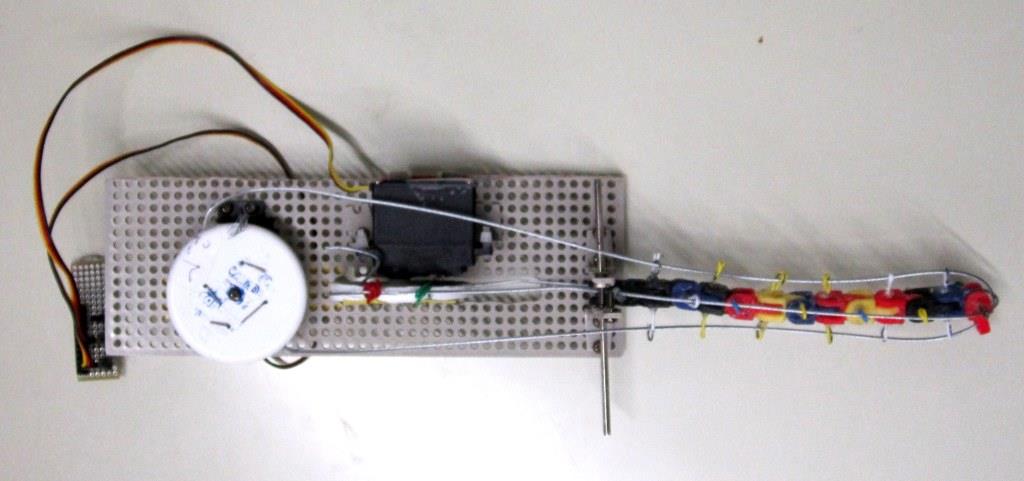
Dog tail prototype (before mounting):
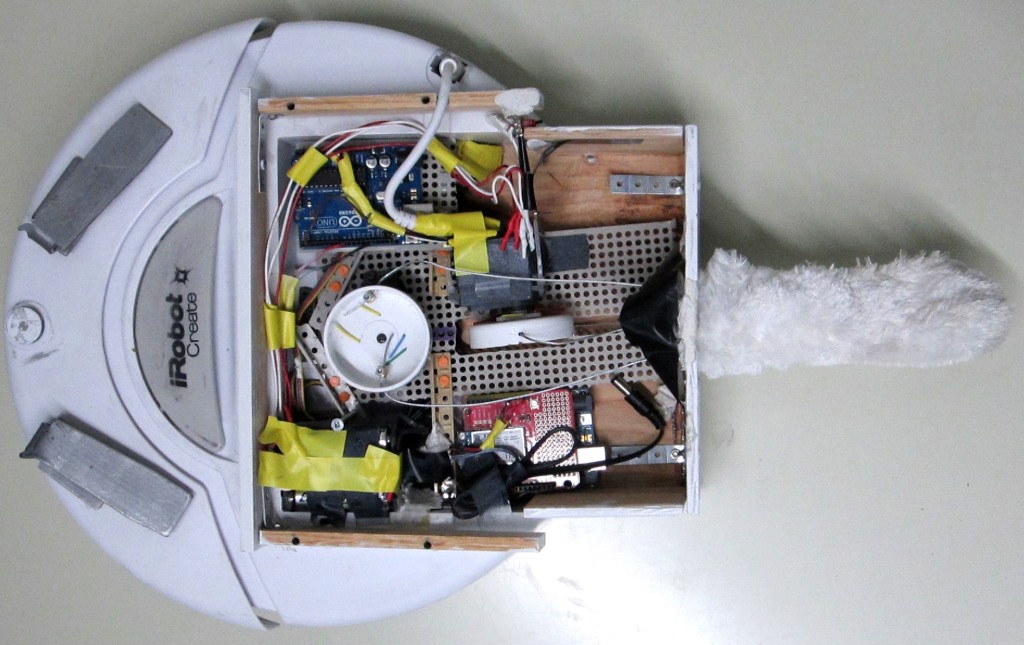
Mounted prototype (lid removed):
Types of tail wagging we explored:

Project Publications




A Dog Tail Interface for Communicating Affective States of Utility Robots
Ashish Singh. A Dog Tail Interface for Communicating Affective States of Utility Robots. M.Sc. Thesis (2014). University of Manitoba, Canada.


Evaluating a Dog-Tail Interface for Communicating Robotic States
Ashish Singh, James E. Young. Animal-Inspired Peripheral Interaction: Evaluating a Dog-Tail Interface for Communicating Robotic States. In proceedings of the Workshop on Peripheral Interaction: Embedding HCI in Everyday Life at the 14th IFIP TC 13 international conference on Human-Computer Interaction - INTERACT'13, 33-38.

A Dog Tail for Utility Robots: Exploring Affective Properties of Tail Movement
Ashish Singh, James E. Young. A Dog Tail for Utility Robots: Exploring Affective Properties of Tail Movement. In proceedings of the 14th IFIP TC 13 international conference on Human-Computer Interaction - INTERACT'13, 403-419.

A Dog Tail for Communicating Robotic States
Ashish Singh and James E. Young. 2013. A dog tail for communicating robotic states. In adjunct proceedings (video abstracts) of the 8th ACM/IEEE international conference on Human-Robot interaction - HRI '13 (2013), 417-418. Best Video Award 2nd Prize.


Animal-Inspired Human-Robot Interaction: A Robotic Tail for Communicating State
Ashish Singh and James E. Young. 2012. Animal-Inspired Human-Robot Interaction: A Robotic Tail for Communicating State. In adjunct proceedings (late-breaking reports) of the seventh annual ACM/IEEE international conference on Human-Robot Interaction - HRI’12 (2012), 237–238.

