« Back to Publications list
Moving a Media Space into the Real World through Group-Robot Interaction
Download Publication File
Abstract
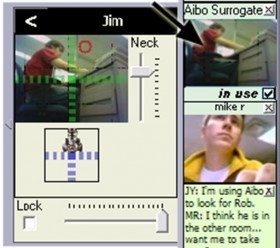
New generation media spaces let group members see each other and share information, but are often static and separated from the physical world. To solve this problem, we propose the AIBO Surrogate—a robotic interface for a media space group, allowing members to extend their group interactions into the physical, real world. Distributed group members see a first-person view of what the robot sees and can control its walking direction, gaze and actions. For members physically collocated with the robot the AIBO Surrogate provides physical presence and awareness: a tele-embodiment of the distributed group.
Video
Download the Moving a Media Space into the Real World through Group-Robot Interaction video file.
Citation
James E. Young, Gregor McEwan, Saul Greenberg and Ehud Sharlin. Moving a Media Space into the Real World through Group–Robot Interaction. In video session and in adjunct proceedings of the 5th International Conference on Pervasive Computing, 2007. Pervasive ’07, Toronto,
Bibtext Entry
@INPROCEEDINGS{Young2007MAM,
author = {James E. Young and Gregor McEwan and Saul Greenberg and Ehud Sharlin},
title = {Moving a Media Space into the Real World through Group-Robot Interaction},
booktitle = c-Pervasive-VID-2007,
year = {2007},
address = p-SpringerAdr,
organization = p-SpringerOrg,
publisher = p-SpringerPub
}