« Back to Publications list
An Analytical Framework to Examine and Describe People’s Expectations of Robots
Download Publication File
Abstract
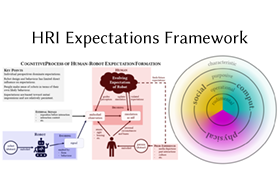
We engaged with the problem of expectation discrepancy in human-robot interaction: a known challenge in which the expectations people form when interacting with a social robot may not align with its actual capabilities. This misalignment, an expectation discrepancy, can disappoint users and hinder interaction. While research has proposed ways to mitigate expectation discrepancy, designers lack a systematic approach to analyzing and describing expectations people form of their robot. A more rigorous theoretical framework is a necessary step towards designing robots to purposefully engineering desired expectations. We consulted theories and models from psychology and sociology on expectations between people, and conducted a survey of expectations in human-robot interactions. Through this we developed an analytical framework consisting of a novel model of the cognitive process of human-robot expectation formation, as well as a taxonomy for classifying the types of expectations they form. We finally propose preliminary methods for designers to use this framework as a tool to support systematic analysis of how and why people form expectations of a given robot and what those expectations may be. Such understanding can empower designers with greater control over people’s expectations, enabling them to combat problems of expectation discrepancy.
Publisher Link
http://hdl.handle.net/1993/38496
Citation
James M. Berzuk. An Analytical Framework to Examine and Describe People’s Expectations of Robots. MSc Thesis (2024). University of Manitoba, Canada.
Bibtext Entry
@mastersthesis{berzuk_analytical_2024,
address = {Winnipeg, Canada},
type = {Master of Science},
title = {An Analytical Framework to Examine and Describe People’s Expectations of Robots},
url = {http://hdl.handle.net/1993/38496},
abstract = {We engaged with the problem of expectation discrepancy in human-robot interaction: a known challenge in which the expectations people form when interacting with a social robot may not align with its actual capabilities. This misalignment, an expectation discrepancy, can disappoint users and hinder interaction. While research has proposed ways to mitigate expectation discrepancy, designers lack a systematic approach to analyzing and describing expectations people form of their robot. A more rigorous theoretical framework is a necessary step towards designing robots to purposefully engineering desired expectations. We consulted theories and models from psychology and sociology on expectations between people, and conducted a survey of expectations in human-robot interactions. Through this we developed an analytical framework consisting of a novel model of the cognitive process of human-robot expectation formation, as well as a taxonomy for classifying the types of expectations they form. We finally propose preliminary methods for designers to use this framework as a tool to support systematic analysis of how and why people form expectations of a given robot and what those expectations may be. Such understanding can empower designers with greater control over people’s expectations, enabling them to combat problems of expectation discrepancy.},
language = {en},
school = {University of Manitoba},
author = {Berzuk, James M.},
year = {2024},
}