« Back to Publications list
Poor Thing! Would You Feel Sorry for a Simulated Robot? A comparison of empathy toward a physical and a simulated robot
Download Publication File
Abstract
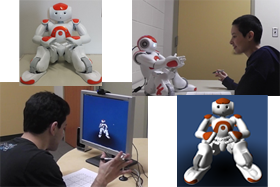
In designing and evaluating human-robot interactions and interfaces, researchers often use a simulated robot due to the high cost of robots and time required to program them. However, it is important to consider how interaction with a simulated robot differs from a real robot; that is, do simulated robots provide authentic interaction? We contribute to a growing body of work that explores this question and maps out simulated-versus-real differences, by explicitly investigating empathy: how people empathize with a physical or simulated robot when something bad happens to it. Our results suggest that people empathize more with a physical robot than a simulated one, a finding that has important implications on the generalizability and applicability of simulated HRI work. Empathy is particularly relevant to social HRI and is integral to, for example, companion and care robots. As part of our exploration, we additionally present an original and reproducible HRI experimental design to induce empathy toward robots, and experimentally validated an empathy-measuring instrument from psychology for use with HRI.
Video
Citation
Stela H. Seo, Denise Geiskkovitch, Masayuki Nakane, Corey King, James E. Young. “Poor Thing! Would You Feel Sorry for a Simulated Robot? A comparison of empathy toward a physical and a simulated robot,” In proceedings of the 10th ACM/IEEE international conference on Human-Robot Interaction, HRI’2015, Portland, Oregon, USA.

Authors

Stela Hanbyeol Seo
Alumni
Denise Geiskkovitch
Alumni
Masayuki Nakane
Alumni
Corey King
Alumni