« Back to Projects list

A Touchscreen Interface for Controlling a Robotic Arm
In this project, we designed a touchscreen interface for the remote control of a multi-degree of freedom robot arm to reduce task load and fatigue. We conducted a controlled user study to compare our interface to an existing commercial keypad interface. Results of this study suggested that our interafce was easier to use, required less cognitive task load, and enabled people to complete tasks more quickly.
The robot arm: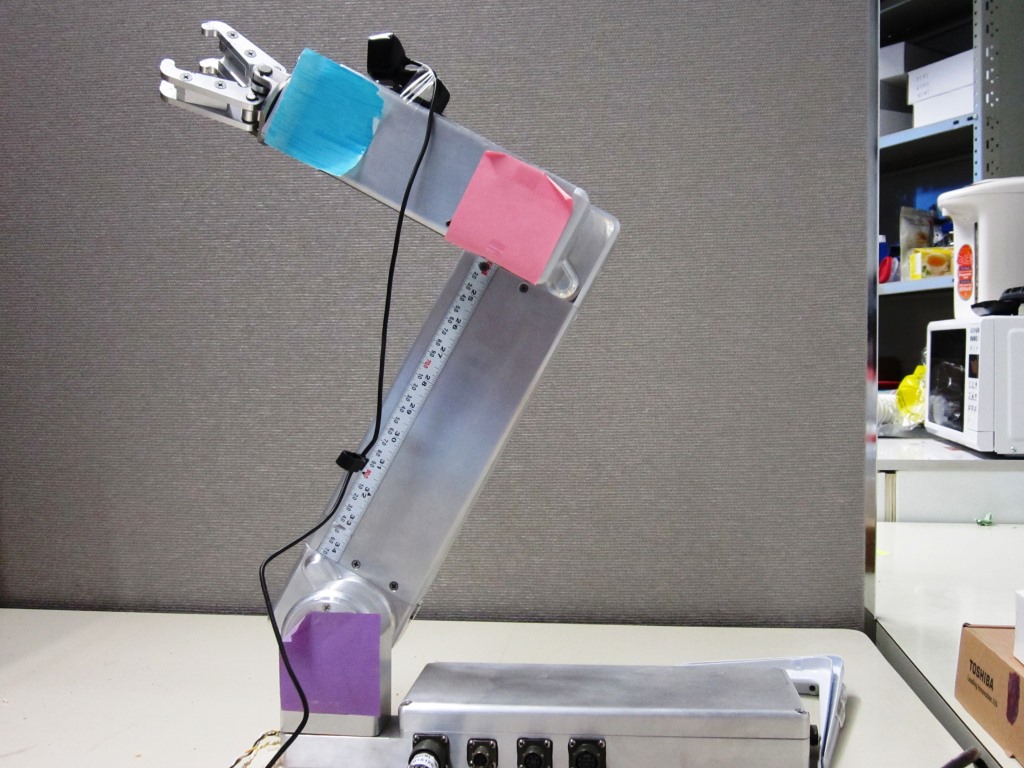
Our touchscreen interface: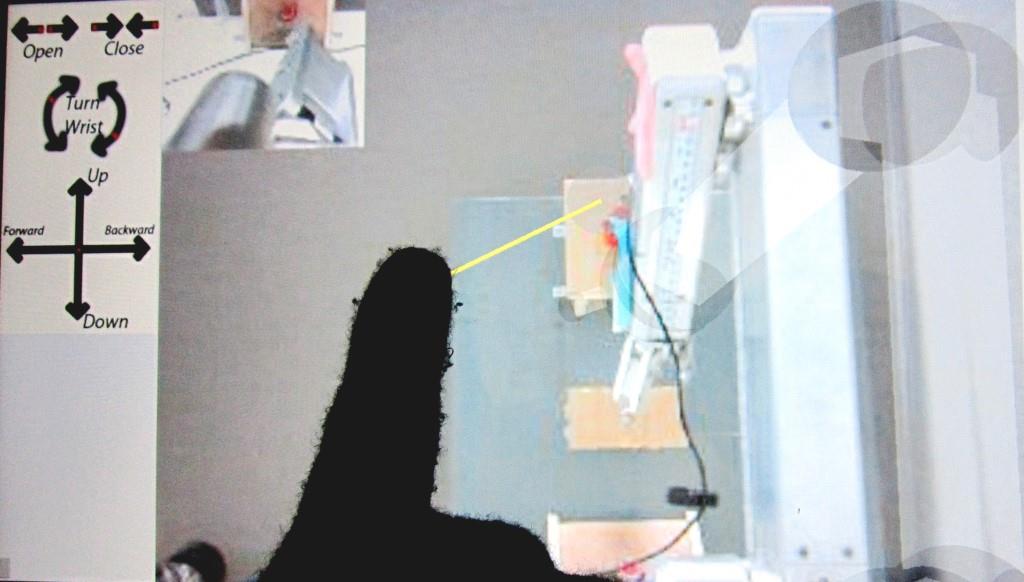
Commercial keypad interface:
Project Publications




An Interface for Remote Robotic Manipulator Control That Reduces Task Load and Fatigue
Ashish Singh, Stela H. Seo, Yasmeen Hashish, Masayuki Nakane, James E. Young, Andrea Bunt. An Interface for Remote Robotic Manipulator Control That Reduces Task Load and Fatigue. In proceedings of the IEEE international conference on Robot and Human Interactive Communication, 2013. RO-MAN'2013, to appear.





