« Back to Projects list
Visual Team State Indicators
In team teleoperation, maintaining awareness of robot team members and their robotic states is important for efficient and successful team coordination. Team teleoperation can be achieved with multiple people controlling a range of robots to provide better coverage (e.g., flying robot, high speed, different sensors), with one operator to reduce the human cost (i.e., one person controls multiple robots), or with some combination of both. However, in all cases working with a team of robots necessarily increases the amount of information for operators to monitor for team cohesion, requiring more cognitive effort. This is a problem as user error remains a primary cause of mistakes in teleoperation scenarios.
Our strategy for mitigating the overwhelming amount of robot state information for an operator’s awareness in team teleoperation is to remove unnecessary details for general awareness and to carefully present high-level data to help the operator to quickly understand team robot states. We select generally applicable mobile robot states across search and rescue scenario. Our goal is to generalize our graphical team robot state representations while having some specifics to be able to investigate use details in search and rescue scenarios. With the selection, we abstract details out to easy-to-understand status. We develop and explore a set of prototypes with different interface parameters to simplify complex team member states, aiming to be easy for an operator to understand.
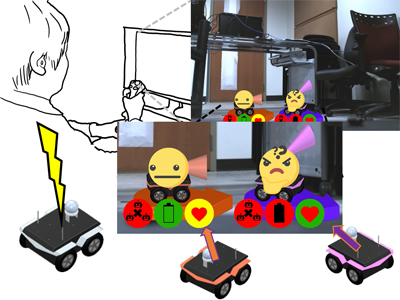
We designed a series of novel visualizations to represent states of other robots in a team, drawing from related work and human perception knowledge. Through a series of pilot studies, we conduct an iterative exploration with general public. We collect people’s opinions on different information representations and graphical visualization parameters for team robot state visualization. We present emerged themes for interface designers to make informed decisions on designing team robot state representations, helping an operator to maintain high situation awareness in team teleoperation.
Our work results in a set of novel widgets for graphically representing robotic state, a testbed design for exploring teleoperation interfaces, and a set of initial guidelines for designing these interfaces. We further include a reflection on our evaluation methods with recommendations for ongoing work.
Video
Project Publications



Novel Egocentric Robot Teleoperation Interfaces for Search and Rescue (2021)
Stela H. Seo. Novel Egocentric Robot Teleoperation Interfaces for Search and Rescue. Ph.D. Thesis (2021). University of Manitoba, Canada.



How are Your Robot Friends Doing?
Seo, S.H., Young, J.E. & Irani, P. How are Your Robot Friends Doing? A Design Exploration of Graphical Techniques Supporting Awareness of Robot Team Members in Teleoperation. Int J of Soc Robotics (2021). https://doi.org/10.1007/s12369-020-00670-9


