« Back to Publications list
Implementing Bubblegrams: The Use of Haar-like Features for Human-Robot Interaction
Download Publication File
Abstract
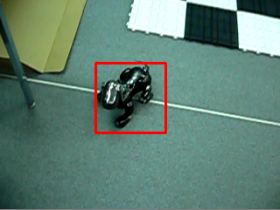
Bubblegrams - a human-robot interaction (HRI) technique - uses MR to allow collocated humans and robots to interact directly by visually augmenting their shared physical environment. Bubblegrams uses interactive comic-like graphic balloons that appear above the robot to allow for interaction between humans and robots. A key technical challenge facing Bubblegrams is the detection of the location of the robot within the user's vision; the MR system needs this information to place the bubble. To solve this, we applied a vision algorithm based on Haar-like features to find and track the robot in real time. This paper introduces the Bubblegrams interface and details the vision algorithm used to detect and track the robot.
Video
Download the Implementing Bubblegrams: The Use of Haar-like Features for Human-Robot Interaction video file.
Citation
James E. Young, Ehud Sharlin, and Jeffrey E. Boyd. Implementing Bubblegrams: The Use of Haar-like Features for Human-Robot Interaction. In Proceedings of the IEEE Conference on Automation Science and Engineering, 2006. IEEE CASE ’06, Shanghai, China, October 8-10, 2006, pages 308--313, IEEE Computer Society Press.
Bibtext Entry
@INPROCEEDINGS{4120363,
author={Young, J.E. and Sharlin, E. and Boyd, J.E.},
booktitle={Automation Science and Engineering, 2006. CASE '06. IEEE International Conference on},
title={Implementing Bubblegrams: The Use of Haar-Like Features for Human-Robot Interaction},
year={2006},
pages={298-303},
keywords={computer graphics;graphical user interfaces;man-machine systems;robots;Bubblegrams interface;Haar-like features;human-robot interaction technique;interactive comic-like graphic balloons;mixed reality;robot tracking;vision algorithm;Application software;Displays;Human robot interaction;Orbital robotics;Physics computing;Robot control;Robot kinematics;Robot vision systems;Virtual reality;Visualization},
doi={10.1109/COASE.2006.326897}}