« Back to Projects list

Conversational Robots for Self-Reflection
We posit if a robot could be able to help people self-reflect through the use of conversation. To answer this, we designed and explored the use of a humanoid robot to support individual self-reflection and wellness. Our approach relies on simple interaction design to avoid complex expectations of the robot that could easily break, and achieve a robust reflective behavior.We focus on creating a fully stand-alone robot to be able to test it in people's homes and learn about their perceptions. We present an initial study where to learn about the feasibility of our design, if our robotic interaction design does work, if people can use it and what they think of it.
Video
Project Publications



Say What You Want, I’m Not Listening! A Conversational Social Robot Behavior Design
Gonzalez, AL, Geiskkovitch, DY, Young, JE. "Say What you Want, I'm not Listening! A conversational social robot behavior design for self-reflection that does not parse user speech." Journal of Interactive Media. In press.



Design and Implementation of a Novel Conversational Companion Robot For Older Adults
Adriana Lorena González. Design and Implementation of a Novel Conversational Companion Robot For Older Adults. MSc Thesis (2022). University of Manitoba, Canada.
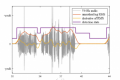
A Simple and Lightweight Algorithm for Social Robot Speech Turn Taking (Technical Report)
González, A.L. and Young, J.E. 2020. A Simple and Lightweight Algorithm for Social Robot Speech Turn Taking. University of Manitoba MSpace repository. (2020).


Please Tell Me About It: Self-Reflection Conversational Robots to Help with Loneliness
Adriana Lorena González. James E. Young. 2020. Please Tell Me About It: Self-Reflection Conversational Robots to Help with Loneliness. In Proceedings of the 8th International Conference on Human-Agent Interaction (HAI '20), November 10–13, 2020, Virtual Event, NSW, Australia. ACM, 2 pages. https://doi.org/10.1145/3406499.3418764

When Can I Get a Robot for my Home?: A Constrained Design Approach to Feasible, Deployable Companion
A.L. González, D. Y. Geiskkovitch and J. E. Young, "When Can I Get a Robot for my Home?: A Constrained Design Approach to Feasible, Deployable Companion," In Proceedings of the 29th International Conference on Robot & Human Interactive Communication (RO-MAN 2020 WORKSHOP ON SOCIAL HUMAN-ROBOT INTERACTION OF HUMAN-CARE SERVICE ROBOTS). 2020.


Emotional Support Domestic Robots for Healthy Older Adults
Annalena Nora Baecker, Denise Y. Geiskkovitch, Adriana Lorena González and James E. Young. 2020. Emotional Support Domestic Robots for Healthy Older Adults: Conversational Prototypes to Help With Loneliness. In Companion Proceedings of 2020 ACM International Conference on Human Robot Interaction (HRI’20), March 23–26, 2020, Cambridge, United Kingdom. ACM, 2 pages. https://doi.org/10.1145/3371382.3378279


